아두이노 조이스틱 (Arduino Joystick For X-wing Alliance)
X-wing 얼라이언스가 스팀으로 발매되었지만 게임패드가 없으면 실행도 안되고 조이스틱이 없으면 실질적으로 진행이 불가능하다.
그래서
만들것이다.
- 아날로그 조이스틱 → USB조이스틱
- 버튼
6개추가 (스틱에 2개,본체에 4개) → 키보드가 같이 있어야 하므로 본체 버튼은 별 필요 없는 듯 - 쓰로틀 추가
준비물


https://www.arduino.cc/en/Tutorial/Button https://www.arduino.cc/en/Tutorial/AnalogInput
http://www.instructables.com/id/Arduino-LeonardoMicro-as-Game-ControllerJoystick/?ALLSTEPS
https://github.com/MHeironimus/ArduinoJoystickLibrary 1.0
https://github.com/MHeironimus/ClassicJoystickAdaptor
배선
- 노랑 - 그라운드
- 빨강 - 단추1
- 주황 - 2
- 보라 - 3
- 회색 - 4
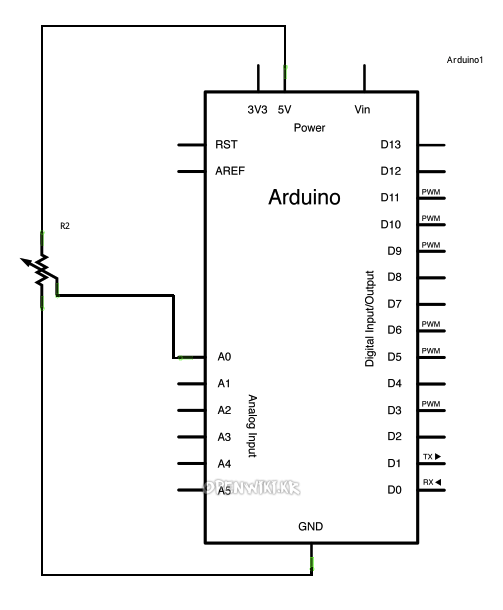
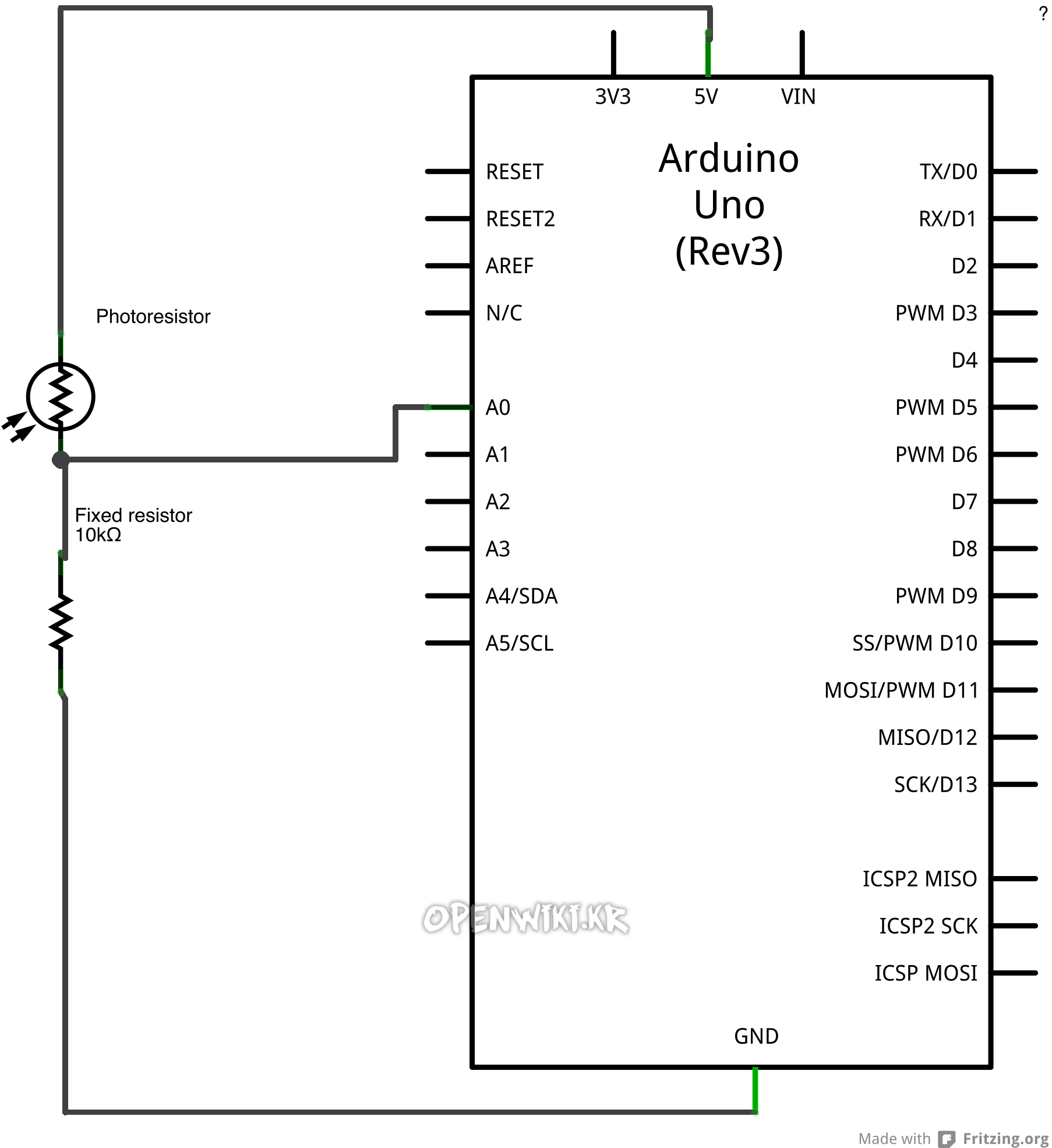
저항연결법
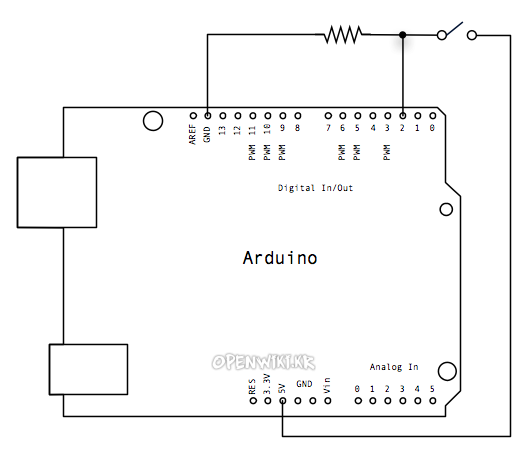
버튼연결법

코드
/* Wingman Extreme Analog Joystick Modification Arduino Leonado or micro is needed // http://www.instructables.com/id/Arduino-Button-with-no-resistor/?ALLSTEPS Note: on most Arduinos there is already an LED on the board attached to pin 13. */ #include "Joystick.h" // https://github.com/MHeironimus/ArduinoJoystickLibrary // Create Joystick Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID, JOYSTICK_TYPE_JOYSTICK, 10, 1, true, true, false, false, false, false, false, true, false, false, false); /* uint8_t hidReportId, uint8_t joystickType, uint8_t buttonCount, uint8_t hatSwitchCount, bool includeXAxis, bool includeYAxis, bool includeZAxis, bool includeRxAxis, bool includeRyAxis, bool includeRzAxis, bool includeRudder, bool includeThrottle, bool includeAccelerator, bool includeBrake, bool includeSteering */ // constants won't change. They're used here to // set pin numbers: const int ledPin = 13; // the number of the LED pin const int hatSwitch = 0; // variables will change: int buttonState = 0; // variable for reading the pushbutton status int xAxis; int yAxis; int hatRead; void setup() { // Set Range Values Joystick.setXAxisRange(-127, 127); Joystick.setYAxisRange(-127, 127); Joystick.begin(); // initialize the LED pin as an output: pinMode(ledPin, OUTPUT); // initialize the pushbutton pin as an input: for (int button = 0; button < 10; button++) { pinMode(button, INPUT_PULLUP); } } void loop() { /* analog axis */ xAxis = (analogRead(A0) - 512) / 4; yAxis = (analogRead(A1) - 512) / 4; Joystick.setXAxis(xAxis); Joystick.setYAxis(yAxis); /* Throttle */ Joystick.setThrottle (analogRead(A2)) ; /* Hat switch http://www.epanorama.net/documents/joystick/pc_joystick.html#connector */ int hatRead = analogRead(A3); // not pressed : 82kohm 107-108 // 0 : 200ohm 1003 // 90 : 20kohm 333-334 // 180 : 41kohm 195-196 // 270 : 61kohm 140-141 if ((hatRead > 900) ) { Joystick.setHatSwitch(hatSwitch, 0); } if ((hatRead > 300) && (hatRead < 360)) { Joystick.setHatSwitch(hatSwitch, 90); } if ((hatRead > 180) && (hatRead < 220)) { Joystick.setHatSwitch(hatSwitch, 180); } if ((hatRead > 130) && (hatRead < 160)) { Joystick.setHatSwitch(hatSwitch, 270); } if (hatRead < 120) { Joystick.setHatSwitch(hatSwitch, -1); } /* Buttons */ // read the state of pins: for (int i = 0; i < 10; i++) { // check if the pushbutton is pressed. // http://www.instructables.com/id/Arduino-Button-with-no-resistor/?ALLSTEPS buttonState = digitalRead(i); if ((buttonState == LOW) ) { Joystick.pressButton(i ); // turn LED on: digitalWrite(ledPin, HIGH); } else { Joystick.releaseButton(i ); // turn LED off: digitalWrite(ledPin, LOW); } } }
미세조정 하는 방법

기타
윈도우 설정에서 못 찾겠으면,
joy.cpl
을 실행해 볼 것.


스타워즈 스쿼드론
| 버튼 | 작용 |
|---|---|
| 1 | 발사 |
| 2 | 전방적 선택 |
| 3 | 좌측 보조무기 |
| 4 | 우측 보조무기 |
| 5 | 목표 전환 |
| 6 | 대응무기 발사 |